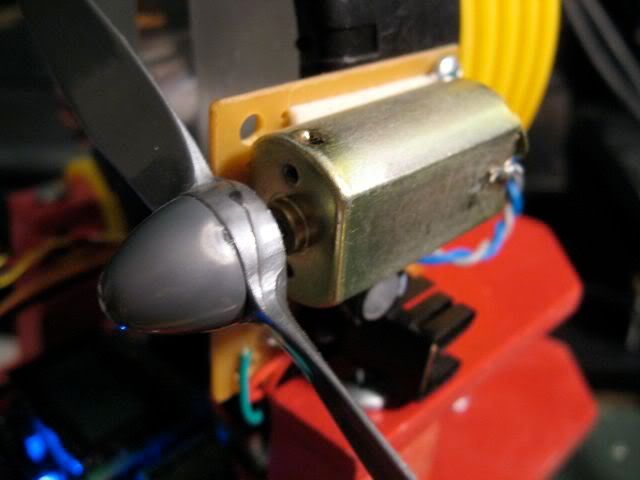
 To continue where we left off, the current required to turn on the TIP3055 NPN power transistor to run Pokey's firefighting fan motor was higher than the 40mA maximum that the ATmega168 can handle.
To continue where we left off, the current required to turn on the TIP3055 NPN power transistor to run Pokey's firefighting fan motor was higher than the 40mA maximum that the ATmega168 can handle.To get around that, let's add a switching transistor to provide that drive current. In turn, this new resistor will require far less base current signal to activate.
This time, let's use a PNP transistor, a 2N3906, to activate the power transistor. PNPs are turned off, that is, put into the cutoff region when the base voltage is high: positive with respect to the collector and emitter voltages, reverse biasing both junctions. Active mode occurs when the base voltage is negative with respect to the emitter voltage, forward biasing that junction, but positive with respect to the collector (reverse biased). Finally, saturation, what we need to achieve to turn the transistor on like a switch, occurs when both junctions are forward biased; the base voltage is negative with respect to both C and E. (Source).
If we put the load for the PNP between the collector and ground, and tie the emitter to our voltage source, we can easily set a base voltage less than the collector by tying it to ground through a resistor.
As with the NPN, we have to select this base resistor, RB, to allow an amount of base current to flow that is 2-10 times the threshold required for the transistor to leave the active mode, given the target collector current, IC.
Note that the current will be flowing out of, rather than into, the base of the PNP. Here's the circuit diagram.
 We'll use a simple voltage source for now to simulate the digital logic signal but eventually we'll replace it with a PULSE source again.
We'll use a simple voltage source for now to simulate the digital logic signal but eventually we'll replace it with a PULSE source again.Worth mentioning, it might not be a bad idea to include a pull-up resistor (say, 10kΩ) from node 10 to +5V. That way the MCU doesn't have to hold a logic high on the line at all times, like during reset, and when it does sink current, the pull-up isn't adding much on top of IB1.
First, recalculate RB2 to account for the VCE1 drop across the new transistor.
RB2 = (VCC-VCE1-VBE2)/IB2 = (5 - 0.3 - 0.7)/48mA = 83Ω
Since we're given Q1's ICsat1 already, all that's needed is to calculate the required IB. Note VCB=0 in saturation. Looking at the datasheet for the 2N3906, hFE=60 at ≈48mA.
IB1sat = IC1sat ÷ hFE = 48mA ÷ 60 = 0.8mA
IB1 = IB1sat • 10 = 8mA
So we can find out Q1's base resistor.
RB1 = VB1/IB1 =(VCC-VBE1)/IB = (5 - 0.7)/8mA = 538Ω
With all that, here's the SPICE file: ex4.cir using, for now, a 5V source for the signal to permit steady state (OP) analysis. With 5V fed to the PNP base, the transistors are off.
| v(4) = 9.000000e+00 [Vce2] i(vm) = 3.730349e-11 [Im] v(5) = 8.760559e-02 [Vbe2] i(vb1) = 2.715710e-14 [Ib1] i(vb2) = 4.940826e-12 [Ib2] |
| v(4) = 1.226405e-01 [Vce2] i(vm) = 4.931866e-01 [Im] v(5) = 7.614809e-01 [Vbe2] i(vb1) = -7.48235e-03 [Ib1] i(vb2) = 3.564787e-02 [Ib2] |
But thankfully there's circuit simulation software to help play what-if games. A little experimentation with SPICE suggests that using a smaller base resistor (such as 400Ω) on Q1 will drive it, and in turn Q2 a little harder, with IB2 closer to the original desired amount.
| v(4) = 1.177275e-01 [Vce2] i(vm) = 4.934596e-01 [Im] v(5) = 7.675888e-01 [Vbe2] i(vb1) = -9.88113e-03 [Ib1] i(vb2) = 4.700498e-02 [Ib2] |
In the next part in the series, I want to cover another SPICE feature, subcircuits, which encapsulate entire circuits behind a few input/output pins. There's a really clever approach to modeling motors, both mechanically and electrically, in SPICE which is what I'll use as the subcircuit. More soon!
<< [Part 1 2 3 4 5] >>