 Time to arm the robots! No, not for world takeover. I'm talking about robotic arms. Digging through the stack of old robot stuff I ran across a photocopy of this ancient, August, 1980 series from Radio-Electronics.
Time to arm the robots! No, not for world takeover. I'm talking about robotic arms. Digging through the stack of old robot stuff I ran across a photocopy of this ancient, August, 1980 series from Radio-Electronics.The first article offers a neat, simple design for a robotic arm that seems relatively easy to build with some basic tools and careful techniques. Interesting excerpts are reproduced here for educational purposes.
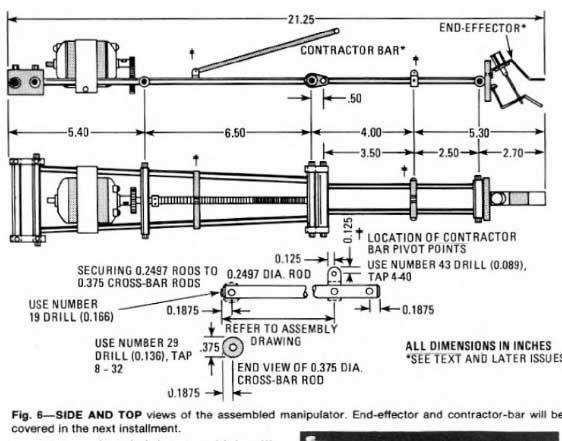 The elbow-forearm actuator is comprised of a large motor and threaded rod that pulls a on the midpoint of the forearm. The shoulder is actuated, I think, from a motor within the robot. Details on the design, dimensions, etc, are given below.
The elbow-forearm actuator is comprised of a large motor and threaded rod that pulls a on the midpoint of the forearm. The shoulder is actuated, I think, from a motor within the robot. Details on the design, dimensions, etc, are given below.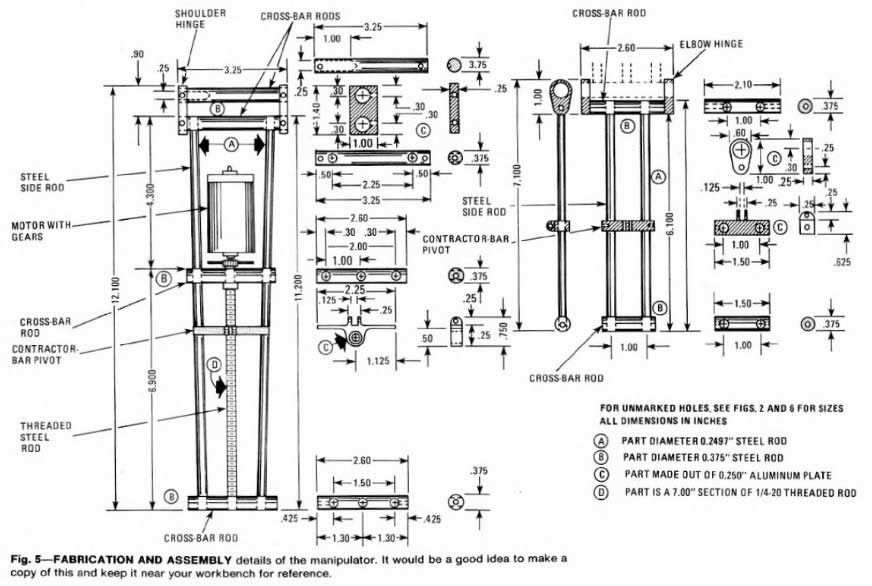 To save weight, I suppose one could change the design to use aluminum tube instead of steel rod for the side rods. They're available from home improvement stores, hardware stores, and online shops.
To save weight, I suppose one could change the design to use aluminum tube instead of steel rod for the side rods. They're available from home improvement stores, hardware stores, and online shops.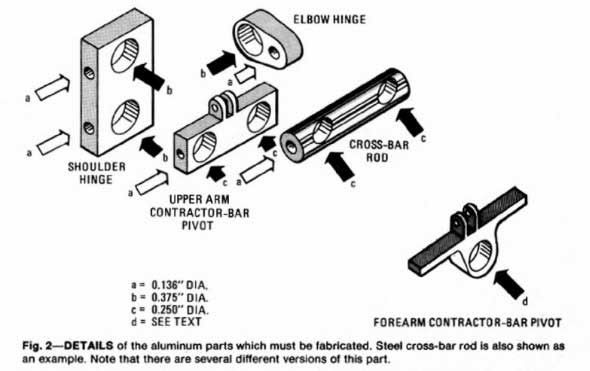 Some parts (right) need to be machined, unless one comes up with a simpler way to fabricate them. If so, I think all that's really needed is a drill press, a way to ensure drilling a hole through the center of a rod, a cutoff saw, some hand tools, and a tap or two.
Some parts (right) need to be machined, unless one comes up with a simpler way to fabricate them. If so, I think all that's really needed is a drill press, a way to ensure drilling a hole through the center of a rod, a cutoff saw, some hand tools, and a tap or two.An electronics article from the 80's would be good for a chuckle. But since motor and mechanical technology haven't changed all that much, I submit that these 30 year old plans are still relevant for the modern robot builder.
Oh man! The unicorn-1 was awesome. I've got the original RE issues in a box in the attic. Thanks for reminding me of this.
ReplyDeleteBrings back memories, that was my first robot.
ReplyDelete