My recent test runs suggest various possible errors in the navigation sensors. Here's what I've come up with so far based on two test runs last night and some offline analysis of the raw sensor data.
GPS Errors
I equipped Data Bus with the iGPS-500 and collected data for both GPS units simultaneously. I thought because the Locosys was getting a fix that it was to be trusted.
But it's been unreliable. Last night the iGPS-500 was the only one of the two modules getting a fix... inside the house! A multi-satellite fix, at that. Long story short the iGPS-500 frequently seems to produce better data.
Below, the iGPS is pictured in blue, the Locosys LS20031 in green. It's all over the map. In my other test run, the iGPS did ok, but went squirrely in the upper right near the big tree. The Locosys looked better in terms of shape but was offset about 50 feet.
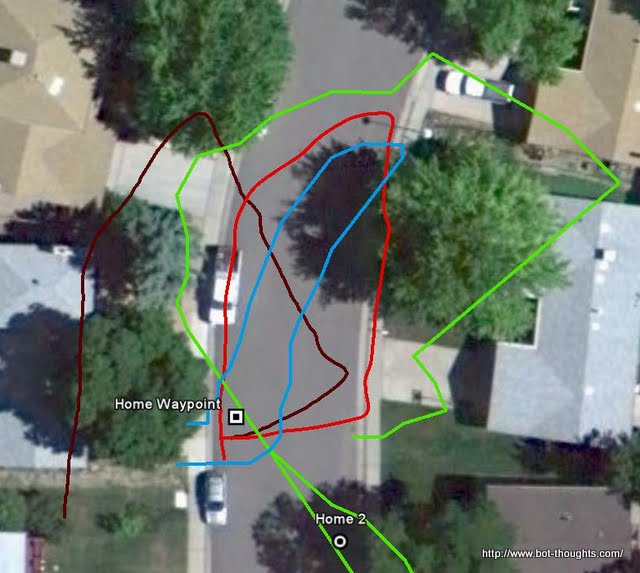
The dark red path above is the dead reckoning plot using compass. The lighter red is the dead reckoning plot produced offline with a perl script, using raw gyro data with a hand-tuned gyro bias. It's easily the closest to reality.
Compass Error
I wanted to see if the compass simply had a bias so I tried correcting and replotting for 20 degrees then 25 degrees.
The pink path below is the original on-board dead reckoning plot. The green is the same plot rotated 20 degrees and the blue, 25 degrees. The red plot is the hand-tuned gyro-based dead reckoning.
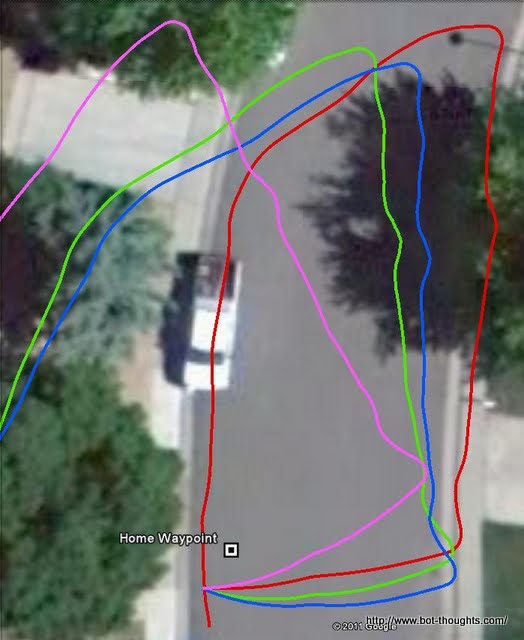
Clearly the issue isn't a simple bias. The compass heading does not seem to change with the correct proportion during turns.
Part of that may be due to the tilt from the convex surface of the road throwing off the heading. Possibly also because the road itself slopes slightly downhill. I don't really know for sure. I need to...
- recalibrate the compass with the on-board calibration routine
- gather data a few more times from a site with flat ground
- experiment plotting my prior 3 test runs
- if the error is still there, determine the nature of the error
If the error isn't due to the sloping street, and if I can describe the error in state space form along with the heading and heading rate (gyro), then I 'should' be able to build a Kalman Filter to deal with it.
Gyro Error
I had been trusting the compass most. It looked so good on a graph. But I was wrong. Using it to plot dead reckoning shows the real truth. I hadn't really trusted the gyro until now.
Experimenting with different bias values, the gyro provides the best dead reckoning information and in fact the best positioning information. It appears that the biggest contributor of error is the bias (or drift of the bias). Which suggests that if could only find a way to calibrate for the bias, I'd have reliable navigation.
The plot shows dead reckoning plots with different bias values. The purple plot shows a previously measured bias of 2027 (that's the raw, 12-bit ADC conversion value, approximately equal to 2.4496V). The blue corresponds to 2028 (2.4508V), green to 2029 (2.4520V). So I tried 2028.5 (2.4514V), the red, and I think that's probably the closest match.

I can't just take an average at standstill because I tried averaging the first several seconds of the data before the robot started moving. The resulting plot was off quite a bit from reality. So... is there a bias that comes into play when in motion, or during turns? Or was it due to temperature effects?
At worst, maybe I can make test runs and hand calibrate bias until the plots look right, and somehow correlate that to temperature. What super sucks is that we're talking about nailing the bias down to the nearest half a millivolt.
Dead Reckoning Integration Error
All the off-line plots were done by integrating heading and distance measurements every 20ms intervals, an order of magnitude more often than the robot's onboard code. Yet, the difference between the plots is pretty negligible. So integration error doesn't seem to play in.

I wonder if there's some distance error due to using straight line interpolation to represent the curved vehicle path. If that error was large, I'd expect to see a bigger discrepancy in plot length visible at the end of the path in the lower left part of the pic above. Instead, the length of the two plots are within 10cm of each other.
Kalman Filtering, Fusion
Maybe this is inexperience talking but at this point I don't see how Kalman filtering can possibly make use of the massive compass and gps errors to stand any chance of correcting for bias on the gyro and producing reliable heading information. I would expect a Kalman filter would basically tune out the measurements from GPS and compass to the point of ignoring them.
Oh yeah, almost forgot, I still have to dodge barrels.
And I haven't done squat with obstacle detection let alone avoidance.
Yup, I'm Screwed
Now I'm struggling to get a reliable 5V power supply for the robot that can deal with massive voltage sags from the BEC under heavy acceleration.
And as of last night, I'm fighting with that stupid, buggy RC switch board again. It switches off control of the MCU but doesn't switch on transmitter control. Great.
And on top of everything else, my espresso machine has been broken for a week and my efforts to revive it last night were in vain.
I'm just not winning right now.
But hey, I'm not complaining. Ok, maybe I am.
Meanwhile, you may wonder why I'm bothering to write all this when I should be working on the robot. Believe me I have been working very hard on the 'bot. These posts help me to collect my thoughts. Also, I feel more accountable to get busy when the time permits.
very cool blog! You've given me a lot to think about. BTW, what are you using for your plots? Homegrown? I thought I would offer you one suggestion. GPS units can interfere with one another if they are too close, so running two GPS units at same time might be a bad idea.
ReplyDelete@JesseJay: Thanks for the compliments, comments, and thoughts!
ReplyDeleteGood to know about GPS interference! I will probably have to stick with one as my 2nd is not working right.
The geo plots are through GPSVisualizer.com and displayed in Google Earth. I'm uploading a csv file generated from a perl script that processes the robot logs, and I get back a .kml file.
The various graphs are done in wgnuplot.
Thanks again!
I also suggest that you mount your compass module on a post. Based on your posted pictures/videos of DATA BUS, I believe the vehicle magnetic field is corrupting your heading. Remember motors produce large magnetic fields and so do other electronics. However, the bigger problem may still be lack of tilt compensation.
ReplyDeleteIf the post (i.e. remote mount) helps, you should also "swing DATA BUS" as in swing a ship.
swing a ship, to
The Oxford Companion to Ships and the Sea | 2006 | 142 words | Copyright
swing a ship, to, to steady a ship on a succession of magnetic compass headings to ascertain the deviations of the compass on those headings.
After you "swing DATA BUS" you use a simple table lookup to correct for deviation. I am currently using an I2C compass module in a similar project. Hope this helps, do not hesitate to ask questions.
Awesome, vehicle...